本帖最后由 mahao 于 2019-10-19 20:00 编辑
新人求助:在Win10 + VS2015 + OpenCV3.4.1环境下对相机进行标定。
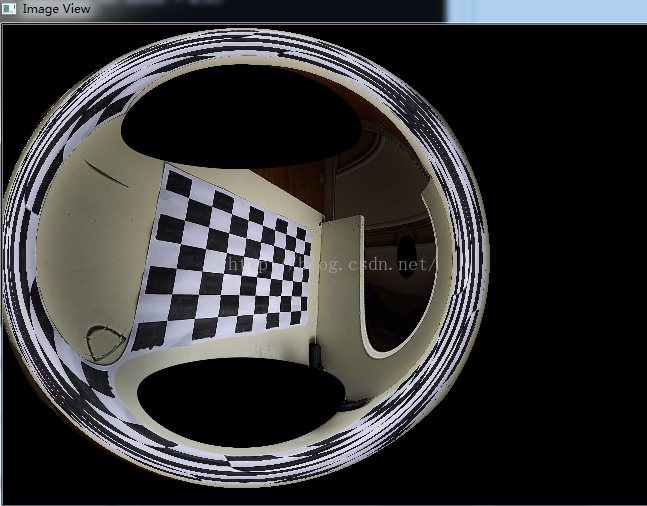
目前已经求出了内参矩阵和畸变系数,在使用两组参数校正后,图像出现很多冗余的内容(变成一个圆的,而不是矩形),代码和实验结果如
下图所示。请问是哪里出了问题?
// 核心代码部分
initUndistortRectifyMap(cameraMatrix, distCoeffs, R,
getOptimalNewCameraMatrix(cameraMatrix, distCoeffs, image_size, 1, image_size, 0),
image_size, CV_32FC1, mapx, mapy);
remap(imageSource, newimage, mapx, mapy, INTER_LINEAR);
// 校正结果如下图所示
|



 发表于 2019-10-19 19:52:33
发表于 2019-10-19 19:52:33
 楼主
楼主