矩阵的掩码操作¶
矩阵的掩码操作很简单。其思想是:根据掩码矩阵(也称作核)重新计算图像中每个像素的值。掩码矩阵中的值表示近邻像素值(包括该像素自身的值)对新像素值有多大影响。从数学观点看,我们用自己设置的权值,对像素邻域内的值做了个加权平均。
测试用例¶
思考一下图像对比度增强的问题。我们可以对图像的每个像素应用下面的公式:
![I(i,j) = 5*I(i,j) - [ I(i-1,j) + I(i+1,j) + I(i,j-1) + I(i,j+1)]
\iff I(i,j)*M, \text{where }
M = \bordermatrix{ _i\backslash ^j & -1 & 0 & +1 \cr
-1 & 0 & -1 & 0 \cr
0 & -1 & 5 & -1 \cr
+1 & 0 & -1 & 0 \cr
}](../../../../_images/math/14e28d2d31dfc5e77008db714ffa79f7ef00f377.png)
上面那种表达法是公式的形式,而下面那种是以掩码矩阵表示的紧凑形式。使用掩码矩阵的时候,我们先把矩阵中心的元素(上面的例子中是(0,0)位置的元素,也就是5)对齐到要计算的目标像素上,再把邻域像素值和相应的矩阵元素值的乘积加起来。虽然这两种形式是完全等价的,但在大矩阵情况下,下面的形式看起来会清楚得多。
现在,我们来看看实现掩码操作的两种方法。一种方法是用基本的像素访问方法,另一种方法是用 filter2D 函数。
基本方法¶
下面是实现了上述功能的函数:
void Sharpen(const Mat& myImage,Mat& Result)
{
CV_Assert(myImage.depth() == CV_8U); // 仅接受uchar图像
Result.create(myImage.size(),myImage.type());
const int nChannels = myImage.channels();
for(int j = 1 ; j < myImage.rows-1; ++j)
{
const uchar* previous = myImage.ptr<uchar>(j - 1);
const uchar* current = myImage.ptr<uchar>(j );
const uchar* next = myImage.ptr<uchar>(j + 1);
uchar* output = Result.ptr<uchar>(j);
for(int i= nChannels;i < nChannels*(myImage.cols-1); ++i)
{
*output++ = saturate_cast<uchar>(5*current[i]
-current[i-nChannels] - current[i+nChannels] - previous[i] - next[i]);
}
}
Result.row(0).setTo(Scalar(0));
Result.row(Result.rows-1).setTo(Scalar(0));
Result.col(0).setTo(Scalar(0));
Result.col(Result.cols-1).setTo(Scalar(0));
}
刚进入函数的时候,我们要确保输入图像是无符号字符类型的。为了做到这点,我们使用了 CV_Assert 函数。若该函数括号内的表达式为false,则会抛出一个错误。
CV_Assert(myImage.depth() == CV_8U); // 仅接受uchar图像
然后,我们创建了一个与输入有着相同大小和类型的输出图像。在 图像矩阵是如何存储在内存之中的? 一节可以看到,根据图像的通道数,我们有一个或多个子列。我们用指针在每一个通道上迭代,因此通道数就决定了需计算的元素总数。
Result.create(myImage.size(),myImage.type());
const int nChannels = myImage.channels();
利用C语言的[]操作符,我们能简单明了地访问像素。因为要同时访问多行像素,所以我们获取了其中每一行像素的指针(分别是前一行、当前行和下一行)。此外,我们还需要一个指向计算结果存储位置的指针。有了这些指针后,我们使用[]操作符,就能轻松访问到目标元素。为了让输出指针向前移动,我们在每一次操作之后对输出指针进行了递增(移动一个字节):
for(int j = 1 ; j < myImage.rows-1; ++j)
{
const uchar* previous = myImage.ptr<uchar>(j - 1);
const uchar* current = myImage.ptr<uchar>(j );
const uchar* next = myImage.ptr<uchar>(j + 1);
uchar* output = Result.ptr<uchar>(j);
for(int i= nChannels;i < nChannels*(myImage.cols-1); ++i)
{
*output++ = saturate_cast<uchar>(5*current[i]
-current[i-nChannels] - current[i+nChannels] - previous[i] - next[i]);
}
}
在图像的边界上,上面给出的公式会访问不存在的像素位置(比如(0,-1))。因此我们的公式对边界点来说是未定义的。一种简单的解决方法,是不对这些边界点使用掩码,而直接把它们设为0:
Result.row(0).setTo(Scalar(0)); // 上边界
Result.row(Result.rows-1).setTo(Scalar(0)); // 下边界
Result.col(0).setTo(Scalar(0)); // 左边界
Result.col(Result.cols-1).setTo(Scalar(0)); // 右边界
filter2D函数¶
滤波器在图像处理中的应用太广泛了,因此OpenCV也有个用到了滤波器掩码(某些场合也称作核)的函数。不过想使用这个函数,你必须先定义一个表示掩码的 Mat 对象:
Mat kern = (Mat_<char>(3,3) << 0, -1, 0,
-1, 5, -1,
0, -1, 0);
然后调用 filter2D 函数,参数包括输入、输出图像以及用到的核:
filter2D(I, K, I.depth(), kern );
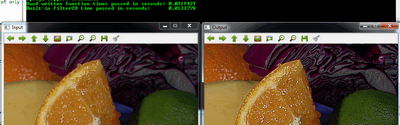
它还带有第五个可选参数——指定核的中心,和第六个可选参数——指定函数在未定义区域(边界)的行为。使用该函数有一些优点,如代码更加清晰简洁、通常比 自己实现的方法 速度更快(因为有一些专门针对它实现的优化技术)等等。例如,我测试的滤波器方法仅花了13毫秒,而前面那样自己实现迭代方法花了约31毫秒,二者有着不小差距。
示例:
你可以从 here 下载这个示例的源代码,也可浏览OpenCV源代码库的示例目录 samples/cpp/tutorial_code/core/mat_mask_operations/mat_mask_operations.cpp 。
我们的 YouTube频道 可观看该程序的运行示例。
翻译¶
loveisp@OpenCV中文网站 <loveispdvd [at] gmail.com>
Help and Feedback
You did not find what you were looking for?- Ask a question in the user group/mailing list.
- If you think something is missing or wrong in the documentation, please file a bug report.